Reach out and touch the tip of your finger to the
tip of your nose. No problem! Try it again with your eyes closed and
it's still simple: you never miss. Even in clumsy people like me, the
brain mostly has control of the body. In athletes, artists,
ballet dancers, and surgeons, "control" means absolute precision.
Now imagine trying to build a robot with the same
degree of mechanical excellence, using gears,
wheels, and levers to
accomplish what the body does with muscle and bone. It's a much
taller order, which makes the human body seem even more impressive.
One of the big difficulties of making well-behaved robots is that
simple electric motors are impossible to move precisely. That's why a
lot of robots swap ordinary motors for what are called stepper
motors (or, sometimes, stepping motors), which can turn through "steps"—well-defined
angles—under precise electronic control. What are they are how do
they work? Let's take a closer look!
Photo: A typical DC stepper motor from an old inkjet printer. How do we know? There are multiple leads coming out of it (unlike with a simple DC motor, which has only two leads). Another way of telling a stepper motor is to hold it near your ear and slowly rotate the axle with your fingers. You should hear and feel the individual steps, a bit like winding a wristwatch.
An ordinary electric motor is based on a simple
bit of magnet science we all learn at school: unlike poles attract,
like poles repel. Here's how a basic motor works...
You take a ring-shaped magnet, put a coil of wire inside it, and feed
electricity through the wire. The wire becomes a temporary magnet
powered by electricity—an electromagnet, in other words—and the
magnetic field it creates repels the field from the permanent magnet
that surrounds it. By switching the current on and off with a clever
little device called a commutator, and some electrical
contacts called brushes, you can make the wire rotate in the
same direction indefinitely. Feed electricity (electrical energy)
into it and you get motion (mechanical energy) back out. That's the
essence of an ordinary motor that uses DC (direct current)
electricity. If you're less than sure how a motor like this works,
you might want to check out our introductory article about electric motors.
We can also make motors that work using AC
(alternating current) instead of DC. Although they're engineered
in a radically different way, they're still based on "like poles
repel, unlike poles attract": the electricity that powers the motor
creates magnetic attraction and repulsion, and a force that makes the
motor spin. You'll find more about AC motors—which are also called
induction motors—in our article on AC induction motors.
Photo: The powerful electric motor from an old lawn mower. The slots at the front are part of the commutator, which is an ingenious device that reverses the electric current and keeps the rotor (the rotating, central part of the motor) spinning in the same direction.
Whether they're powered by DC or AC, ordinary
motors are the hidden electric muscles that power modern life: you'll
find them in all kinds of gadgets and gizmos in the world around you,
from food blenders and refrigerators to
vacuum cleaners and electric
trains. But in all these machines, the rotors of their motors spin continuously.
When you vacuum a carpet or commute to work by subway, the motors
that are working for you turn around an arbitrary number of times:
there's no precise control over how many times they rotate and what
angle they spin through—and it really doesn't matter.
Now suppose you want to make an electric-powered
robot arm that turns through an exact angle (an exact number of
degrees) so it can successfully grab a cup of coffee off your desk.
You could fit an electric motor onto a wooden or
plastic lever to
make it turn when you switch on the power, and you could flick the
power on very briefly so the arm sweeps through a certain angle and
then stops. The trouble is, there's no way of knowing how much of an
angle the motor (or the arm) will move: it depends on everything from
the power of the motor and the electric current driving it to the
weight of the arm and even which way the wind is blowing. A motor that
moves in such an arbitrary way is no use whatever in robotics: your
coffee will surely end up on the floor! That's where a stepper motor
comes in: it's a special kind of DC motor designed so you can make it
rotate through a precise angle, instead of spinning round by a random
amount.
Artwork: An ordinary motor (left) rotates by an arbitrary amount when you switch it on and then off quite quickly; there's no way to control how much it turns, since it depends on various different factors
(including the "load"). By contrast, a stepper motor (right) can be made to turn through a fairly precise angle.
It's much more controllable.
Sponsored links
What exactly is a stepper motor?
Photo: The philosophy of steps: we think of steps as a way to climb up, but they're also a way to break a fixed distance into equal-sized pieces so we get more control over our movements. We can think of them as turning vague, variable, analog amounts of distance into specific, discrete, digital
chunks. Photo of The 16th Avenue Tiled Steps Project, San Francisco, courtesy of
the Jon B. Lovelace Collection of California Photographs in Carol M. Highsmith's America Project,
Library of Congress, Prints and Photographs Division.
Stepper motors are different from ordinary DC motors in at least four important ways.
The first difference you notice is that they have no brushes or commutator (the parts of a DC motor that
reverse the electrical current and keep the rotor—the rotating part
of a motor—constantly turning in the same direction). In other
words, stepper motors are examples of what we call brushless
motors. (You'll also find brushless motors in many electric
vehicles, hidden away in the wheel hubs; used in that way, they're
called hub motors.)
The second major difference is in what rotates. Remember that in
a basic DC motor, there is an outer permanent magnet or magnets that
stays static, known as the stator, and an inner coil or coils of wire
that rotates inside it, which is the rotor. In a brushless hub-motor,
the coils of wire are static in the center and the permanent magnets
spin around them on the outside. A stepper motor is different again.
This time, the permanent magnets are on the inside and rotate (making up the
rotor), while the coils are on the outside and stay static (making up
the stator).
Photo: A pair of typical stepper motors.
The third big difference between an ordinary DC
motor and a stepper motor is in the design of the stator and the
rotor. Instead of one large magnet on the outside (the stator) and
one large coil rotating inside it (the rotor), a stepper motor has an
inner magnet effectively divided up into many separate sections,
which look like teeth on a gear wheel. The outer coils
have corresponding teeth that provide magnetic impulses, attracting,
repelling, and making the teeth of the inner wheel rotate by small
steps. This will become clear in a moment when we look at some pictures.
The final difference is that a stepper motor can stay still, in a certain position, once it's rotated through a particular
angle. That's obviously crucially important if you want a motor to power something like a robot arm, which
might have to rotate a certain amount and then remain in precisely that spot while another part of the robot does
something else. This feature is sometimes called holding torque (torque is the rotary
force something has, so "holding torque" simply means a stepping motor's ability to stay still).
How does a stepper motor work?
The basic construction
I'm going to simplify stepper motors here to illustrate the simple, central idea: the (inside) rotor of
a stepper motor turns by small, discrete amounts (steps) because the (outside) stator applies magnetic impulses that pull and push it
around.
Photo: A stepper motor's rotor is made from two discs placed together so we get a series of alternating north and south poles. I've simulated the idea by coloring my hands and putting them on top of one another so the fingers alternate when viewed from above.
The rotor
The rotor itself is made from two discs, a little like gears, one of which is a magnetic north pole (red) and the
other is a south pole (blue). When we put the two discs back to back, we get north and south pole teeth alternating around the edge.
If you find that hard to picture, imagine your left hand is a magnetic north pole and is colored red, while your
right hand is a magnetic south pole and colored blue. If you put one hand on top of the other so the fingers
of one hand alternate with the fingers of the other, then look down, you'll see alternating north and south pole "teeth"
(the fingers) around the edge. That's effectively what we have in the rotor of a stepper motor.
The stator
Around the edge of the rotor, we have the stator: in this example, four electromagnets that can be switched on and off individually. Generally
the electromagnets in a stepper motor work in pairs, with each opposing pair of magnets switching on together to make a north pole at the same time, followed by the magnets at right angles, which also work together. I prefer to draw it a slightly different way, which I think is simpler and easier to understand. Exactly what switches on when depends on how many rotor teeth (steps) there are and how many electromagnet coils surround them: the geometry and alignment of a stepper motor has to be just right to make the rotor turn.
How it rotates
The right electromagnet is energized and becomes a north pole (red) and the left electromagnet becomes a south pole (blue). This pulls the rotor around by one step so a blue tooth on the rotor snaps toward the right electromagnet and a red tooth snaps toward the left electromagnet.
Now the bottom electromagnet becomes a north pole, the top magnet becomes a south pole, and the two horizontal magnets are switched off. Again, the teeth of the rotor are pulled around by one step.
The vertical magnets are now switched off and the horizontal magnets are switched on again, but with the opposite polarity (pattern of magnetism) that they had before. The teeth of the rotor advance by one more step.
Finally, the vertical magnets are switched on again, in the opposite polarity to before, and the horizontal magnets are switched off. The rotor mores around one more step. The whole cycle then repeats.
Remember that a stepper motor isn't really designed to keep spinning around and around: by sending as many or as few impulses to the outer electromagnets as necessary, we can make the rotor turn through a certain number of steps (and, therefore, by a precise angle). We can make it rotate the opposite way by reversing the electric current.
Sponsored links
Types of stepper motors
This is just a simple overview of stepper motors and I won't go into details about all the numerous different varieties
you'll find. A couple of technical terms that are worth knowing crop up often in the literature (and in web pages) about stepper motors, often without any explanation.
Poles
The motor I've illustrated here has a rotor magnet divided into lots of alternating north and south poles, so this design
is known as a multi-pole motor. The more poles, the shorter the distance the motor
rotates on each step and the more precisely it can be controlled.
Phases
In a motor, a "phase" usually means one or two opposing electromagnets that operate alternately (out of sync with one another or out of phase, if you prefer). The motor I've illustrated up above has two phases (two pairs of electromagnets, so four electromagnets in total, arranged at 90 degrees). In a three-phase stepper motor, you might have three electromagnets arranged at an angle of 120 degrees (so three individual electromagnets, although a three-phase motor could also have three pairs arranged 60 degrees apart). A four-phase motor has eight electromagnets arranged in four pairs, with each one separated from the next by 45 degrees.
Photos: Inside a two-phase, can stack, stepper motor: Not all stepper motors look and work exactly like my artworks and animation up above. This is an example of a permanent magnet, can stack, stepper motor, in which the parts are arranged in layers. In the first photo, you can see what it looks like when you take the top off. In the second photo, I've taken all the bits out and arranged them in sequence. They are: 1) Upper stator cup and outer teeth. 2) Rotor (a multi-pole permanent magnet fixed to a rotating shaft); 3) Upper coil; 4) Inner stator teeth; 5) Lower coil; 6) Lower stator cup and teeth. It works in a broadly similar way to the motor I've explained up above, except that the teeth are static (part of the stator), while a permanent magnet (made of multiple poles) rotates inside them and turns the motor shaft around as it does so.
Advantages and disadvantages of stepper motors
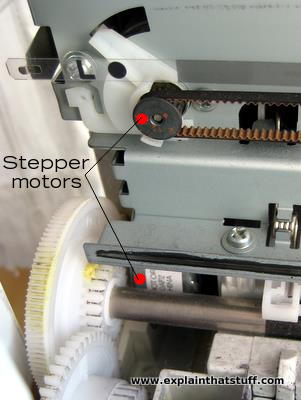
Photo: Inside an inkjet printer, a very common application of stepper motors. You can see two stepper motors here: the top one moves the ink cartridge and print head from left to right by turning the black and brown belt, while the bottom one spins the white gears, which turn the paper rollers and make the paper feed through.
The reason for using a stepper motor is to achieve precise control: you can make it move through a defined angle. But
there are drawbacks too. Stepper motors can sometimes be quite jerky,
because they start and stop each step with a sudden impulse, which
isn't always what you want if you're trying to build a precision
machine.
An alternative to using a stepper motor is to use a servo
motor: a motor with a built-in feedback mechanism. Typically, a servo
motor has what's called an optical encoder attached to its rotor. In
plain English, that's a black-and-white patterned disc that moves in
front of something like a photoelectric cell.
As the disc turns, the cell detects the black and white pattern and an electronic circuit
figures out from this exactly how much the disc has rotated. Using
this feedback, the motor can be controlled more smoothly (and
typically much more precisely) than a simple stepper motor. Servo motors are much
more sophisticated in design than stepper motors and tend to be more expensive,
which is why steppers are often used instead.
Who invented the stepper motor?
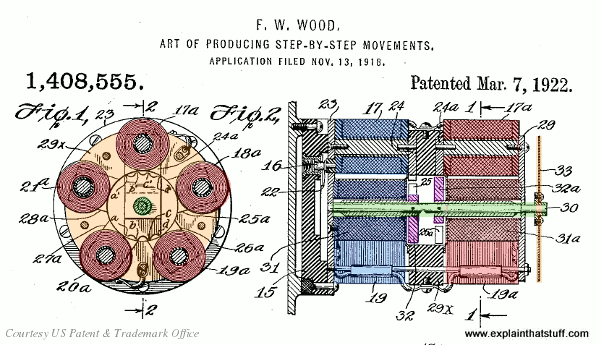
For my money, it was Frank W. Wood in a couple of patents filed between 1912 and 1918. Here's the 1918-filed design (officially patented on March 7, 1922), titled "Art of producing step-by-step movements," which uses an outer ring of five magnets (energized in various combinations) to make a pair of inner magnets and a shaft rotate. In Wood's own words, his gadget produces "step-by-step movements to a rotable element... provided by the resultant action of a plurality of magnetic circuits."
Chris Woodford is the author and editor of dozens of science and technology books for adults and children, including DK's worldwide bestselling Cool Stuff series and Atoms Under the Floorboards, which won the American Institute of Physics Science Writing award in 2016. You can hire him to write books, articles, scripts, corporate copy, and more via his website chriswoodford.com.
Sponsored links
Don't want to read our articles? Try listening instead
Physclips: Electric motors and generators: This is a great introduction to AC and DC motors with lots of diagrams and animations. It includes a little bit of information about multi-pole motors and stepper motors.
Microchip Technology Inc: Stepping Motor Fundamentals by Dr Douglas Jones, Microchip Technology, Inc., 2004. This is a more technical, 22-page guide to stepper motors that compares the various different types, including how to choose the right motor for a job. [PDF format]
Stepping Motors: A Guide to Theory and Practice by Paul Acarnley, Institution of Engineering and Technology, 2002/2007. One of the most complete single-volume guides to stepper motors and the circuits needed to drive them.
How stepper motors are made and how they operate: This great animation, by
Giorgos Lazaridis of the Pcbheaven website, takes a stepper motor apart completely, shows you exactly how it's made, and then shows how it works. A very good introduction that should (hopefully) fill in any gaps in your understanding from reading my own article. It shows the construction of the rotor very clearly.
What is a stepper motor?: A more technical slideshow-type introduction from Microchip Technology, with more detail about how to choose a different motor for particular jobs. Also goes into the pros and cons of stepper motors and how to control them.
Patents
For real nitty-gritty and detailed technical illustrations, patents are probably the best place to look:
US Patent 1,408,555: Electrical indicator system by Frank Wood, Charles Cory & Son Inc., June 23, 1914. This is the earliest stepper motor I've found in the USPTO database. Some online sources hint that stepper motors were invented in 1920 by an Englishman named Walker, but I've been unable to track him down. Wood's later invention
US Patent 1,408,555: Art of producing step-by-step movements (granted March 7, 1922) refers back to this one and is also of interest.
On the strength of these patents, I'd argue that Frank Wood invented the stepper motor in 1912 (the filing date for the first patent)—but please do get in touch if you know differently.
Please do NOT copy our articles onto blogs and other websites
Articles from this website are registered at the US Copyright Office. Copying or otherwise using registered works without permission, removing this or other copyright notices, and/or infringing related rights could make you liable to severe civil or criminal penalties.